Modèle:AlL'introduction du stigmatisme n'ayant pas encore été introduite en cours, l'est dans ce chapitre mais, ce n'est pas une notion spécifique au miroir plan, elle concerne tous les systèmes optiques qu'ils soient composés de dioptres ou de miroirs quelle que soit leur forme.
Notion de système optique
Modèle:AlUn système optique est l'espace optique entre deux surfaces, il est destiné à permettre la transmission de la lumière, la surface sur laquelle arrive la lumière incidente est appelée « face d'entrée » et celle à partir de laquelle émerge la lumière « face de sortie » ;
Modèle:Alil peut être composé d'une « succession de dioptres », dans ce cas le système est dit « dioptrique »[1] ou Modèle:AlModèle:Transparentcomposé d'une « succession de dioptres et d'un miroir », dans ce cas le système est dit « catadioptrique »[2].
Notion de point objet, espaces objets, nature réelle ou virtuelle
Modèle:AlUn objet lumineux est une « source lumineuse » ou un « objet sans émission interne de lumière mais éclairé par une source lumineuse »[3] ; il est qualifié de ponctuel s'il est « de dimension mésoscopique »[4], il peut être situé Modèle:Alen-deçà de la face d'entrée du système optique étudié, il « émet » alors un faisceau « divergent » en direction de la face d'entrée et ayant une existence réelle il est qualifié d'« objet réel » ou Modèle:Alau-delà de la face d'entrée du système optique étudié, il résulte alors de la convergence d'un faisceau lumineux en un point dont l'existence serait réelle si la face d'entrée n'était pas située en-deçà de ce point, il est alors qualifié d'« objet virtuel » ;
Modèle:Alon définit alors deux « espaces optiques de positionnement des objets »[5] :
un « espace objet réel » situé en-deçà de la face d'entrée et
un « espace objet virtuel » situé au-delà de la face d'entrée.
Positionnement des espaces objets réel et virtuel à gauche, des espaces images réelle et virtuelle à droite[6]
Notion d'axe optique principal (associé à un point objet), plans transverses
Modèle:AlOn appelle « axe optique principal associé à un point objet»[7] la succession du « rayon incident passant par le point objet et normal à la face d'entrée »[8] et des « rayons correspondants se propageant dans les espaces optiques successifs »[9] ;
Modèle:Alles plans à l'axe optique principal sont qualifiés de « plans transverses ».
Exemples d'axe optique principal d'un dioptre ou d'un miroir[10]
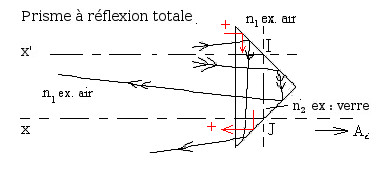
Exemples d'axe optique principal d'un prisme à réflexion totale[10] ou d'un fibre optique courbée[11]
Modèle:AlRemarques : La succession d'un « rayon incident passant par le point objet mais non normal à la face d'entrée » et des « rayons correspondants se propageant dans les espaces optiques successifs » définit un axe optique secondaire ; pour un point objet il n'y a qu'un axe optique principal mais une infinité d'axes optiques secondaires.
Modèle:AlModèle:TransparentLa définition « la plus générale »[12] d'un « axe optique »[13] d’un système optique est la « trajectoire moyenne » des rayons lumineux d’un pinceau arrivant sur le système optique lors de la propagation de ces derniers à travers le système voir la partie droite du schéma immédiatement au-dessus.
Notion d'image d'un point objet par un système optique
Modèle:AlUn faisceau issu d'un point objet étant constitué de rayons incidents indépendants les uns des autres, on détermine le trajet des rayons intermédiaires et émergents correspondant aux rayons incidents du faisceau et deux cas se présentent :
tous les rayons émergents sont concourants, le système optique donne alors du faisceau incident issu de un faisceau convergent en un point , définit alors l'« image de par le système optique » et cette image est « ponctuelle »[14],
tous les rayons émergents ne sont pas concourants mais leur ensemble possède une zone de resserrement à éclairement maximal qui peut être considérée comme l'image « non ponctuelle »[15] de par le système optique.
Stigmatisme rigoureux d'un système optique pour un point objet
Modèle:AlSi le point objet admet un point image par le système optique quelle que soit l'ouverture du faisceau incident issu de , on dit qu'il y a « stigmatisme rigoureux du système optique pour le point objet » ;
Modèle:Alsi la propriété est vraie pour tous les points objets possibles, on dit que « le système optique est stigmatique rigoureux »[16].
Conjugaison rigoureuse d'un couple de points par un système optique
Modèle:AlS'il y a stigmatisme rigoureux d'un système optique pour le point objet , le point image étant noté , on dit encore que « le couple de points est conjugué rigoureux par le système optique ».
Espaces images, nature réelle ou virtuelle
Modèle:AlS'il y a stigmatisme rigoureux du système optique, tout point objet admet un point image unique par le système optique ; peut être situé
Modèle:Alau-delà de la face de sortie du système optique étudié, correspondant au point de « convergence du faisceau émergent », et ayant une existence réelle il est qualifié d'« image réelle » ou
Modèle:Alen-deçà de la face de sortie du système optique étudié, il résulte alors de la « divergence du faisceau émergent » à partir d'un point sans existence réelle, il est alors qualifié d'« image virtuelle » ;
Modèle:Alon définit alors deux « espaces optiques de positionnement des images »[17] :
un « espace image réelle » situé au-delà de la face de sortie et
un « espace image virtuelle » situé en-deçà de la face de sortie.
Construction de l'« image » d'un objet ponctuel par un miroir plan, stigmatisme rigoureux d'un miroir plan
Construction fondamentale d'un émergent correspondant à un incident donné
Construction d'un émergent par un miroir plan correspondant à un incident donné
Modèle:AlMéthode de construction du réfléchi de l'incident AI :
Modèle:Al étant un point quelconque de l’incident, construire symétrique de par rapport au miroir, est alors le prolongement virtuel du rayon réfléchi .
Modèle:AlJustification de la construction ci-contre :
Modèle:AlSoit le rayon incident ci-contre qui se réfléchit sur le miroir plan en point d’incidence, d'angle d'incidence «» avec un point quelconque de la partie réelle du rayon incident, le plan d’incidence c.-à-d. le plan contenant et étant le plan de l'écran ;
Modèle:Alde la 1ère loi de Snell-Descartes[18]Modèle:,[19] de la réflexion[20], on déduit que le rayon réfléchi est dans le plan de l'écran ;
Modèle:Alde 2ème loi de Snell-Descartes[18]Modèle:,[19] de la réflexion[21], on déduit l'angle de réflexion «», c.-à-d. l'opposé de l'angle d'incidence, d'où le prolongement « virtuel » du réfléchi est symétrique de l'incident par rapport au miroir ; on en déduit que symétrique de par rapport au miroir appartient à ce prolongement virtuel C.Q.F.D.[22].
Stigmatisme rigoureux d'un miroir plan
Justification du stigmatisme rigoureux d'un miroir plan pour un point objet réel
Modèle:AlSoit un point objet réel point source d’un faisceau incident dont on a représenté deux rayons incidents sur la figure ci-contre[23] à droite ;
Modèle:Alchaque rayon incident issu de admet un réfléchi dont le prolongement virtuel passe par le symétrique de par rapport au miroir et par suite tous les rayons réfléchis étant issus de , appartiennent à un même faisceau de sommet ;
Modèle:Al, le symétrique de par rapport au miroir, est donc le point image conjuguée du point objet la conjugaison entre et est rigoureuse car il n’y a aucune restriction sur le rayon incident issu de d'où le « stigmatisme rigoureux du miroir plan pour tous les points objets réels ».
Justification du stigmatisme rigoureux d'un miroir plan pour un point objet virtuel
Modèle:AlSoit un point objet virtuel c.-à-d. le point de convergence d'un faisceau incident situé au-delà du miroir plan[24] voir la figure ci-contre[23] à gauche ;
Modèle:Alchaque rayon incident dont le prolongement aboutit à admet un réfléchi passant par le symétrique de par rapport au miroir et par suite tous les rayons réfléchis aboutissant à , appartiennent à un même faisceau de sommet ;
Modèle:Al, le symétrique de par rapport au miroir, est donc le point image conjuguée du point objet la conjugaison entre et est rigoureuse car il n’y a aucune restriction sur le rayon incident aboutissant à d'où le « stigmatisme rigoureux du miroir plan pour tous les points objets virtuels ».
Modèle:AlFinalement, ayant démontré le stigmatisme rigoureux du miroir plan pour tous les points objets réels ou virtuels, on peut affirmer
« le stigmatisme rigoureux des miroirs plans » ; de plus l'image et l'objet sont toujours de nature différente, l'image d'un objet réel étant virtuel et l'image d'un objet virtuel, réelle.
Points doubles d'un miroir plan et la nature afocale de ce dernier
Modèle:AlOn appelle « point double » d'un système optique stigmatique rigoureux, « un point objet qui est son propre conjugué rigoureux par le système optique »[25] ;
Modèle:Alconsidérant un miroir plan et les objets ponctuels situés sur un même axe optique principal, on peut définir sur cet axe deux points doubles :
Justification de la propriété de point double pour les points d'un miroir plan
Justification de la propriété de point double pour les points à l'infini d'un miroir plan
le « sommet du miroir » c.-à-d. « l'intersection du miroir et de l'axe optique principal », voir vérification sur figure ci-dessus à gauche, Modèle:Alun faisceau convergeant en se réfléchit en faisceau divergeant à partir de d'où « le sommet du miroir plan est un point double de ce dernier pour l'axe optique principal considéré »[26],
le « point à l'infini de l'axe optique principal » voir vérification sur figure ci-dessus à droite, Modèle:Alun « faisceau de direction normale au miroir » se réfléchit sur lui-même[27] d'où « le point à l'infini est un point double du miroir pour l'axe optique principal considéré »[28] ; Modèle:Alde cette propriété on en déduit que le miroir plan est un système « afocal » voir définition ci-dessous.
Modèle:AlDéfinition de système focal, de système afocal :
Modèle:AlUn système optique est dit « focal » si « le point à l'infini de l'axe optique principal est le conjugué d'un point à distance finie »,
Modèle:AlModèle:Transparentil est dit « afocal » si « le point à l'infini de l'axe optique principal est un point double ».
Notion d'aplanétisme rigoureux
Définition d'un objet linéique transverse
Modèle:AlUn « objet étendu » peut être considéré comme une « juxtaposition de points objets indépendants », nous ne considérerons par la suite que des « objets étendus à une dimension »[29] ;
Modèle:Alun objet étendu à une dimension est dit « linéique » si les points objets le constituant sont « alignés »,
Modèle:Alun objet linéique est dit « transverse » si les points objets alignés le constituant sont « dans un même plan transverse ».
Conséquence du caractère "stigmatisme rigoureux" d'un système optique sur un objet linéique transverse
Modèle:AlLe système optique étant « stigmatique rigoureux », tous les points objets constituant l'objet linéique transverse «» admettent un point image unique et par suite Modèle:AlModèle:Transparent« le système optique donne de l'objet linéique transverseune image unique »[30] ; mais a priori Modèle:AlModèle:Transparentles points images composant ne sont pas nécessairement alignés l'image n'est donc pas nécessairement linéique et s'ils le sont Modèle:AlModèle:Transparentils ne se situent pas nécessairement dans un même plan transverse si l'image est linéique, elle n'est pas nécessairement transverse.
Définition de l'aplanétisme rigoureux d'un système optique stigmatique rigoureux
Modèle:AlUn système optique stigmatique rigoureux est « aplanétique rigoureux » si « l'image d'un objet linéique transverse est elle-même linéique transverse quelles que soient la position et la dimension de l'objet » ; Modèle:All'« aplanétisme rigoureux d'un système optique stigmatique rigoureux » est donc la conservation du caractère « linéique transverse » lors de la conjugaison rigoureuse du système optique quel que soit l'objet.
Construction de l'image d'un objet linéique transverse par un miroir plan, aplanétisme rigoureux d'un miroir plan
Construction de l'image d'un objet linéique transverse par un miroir plan
Justification de l'aplanétisme rigoureux d'un miroir plan pour un objet linéique transverse réel
Modèle:AlSoit l'objet linéique transverse réel de point objet générique voir figure ci-contre[31] dont on cherche l'image de point image générique par le miroir plan ;
Modèle:Alchaque point objet ayant pour image , le symétrique de par rapport au miroir plan nous en déduisons que Modèle:Al« l'image est symétrique de l'objet », l'image de l'objet réel étant virtuelle ;
Modèle:Alon pourrait faire la construction à partir d'un objet linéique transverse virtuel de point objet générique , on trouverait que Modèle:Al« l'image est symétrique de l'objet », l'image de l'objet virtuel étant réelle.
Aplanétisme rigoureux d'un miroir plan
Modèle:AlReprenons la figure ci-contre, restant à distance constante du miroir caractère linéique transverse de l'objet, il en est de même de d'où Modèle:Alle « caractère linéique transverse » de l'image quelles que soient la position et la dimension de l'objet réel ou virtuel ;
Modèle:Alon en déduit l'« aplanétisme rigoureux du miroir plan » étant donné que la propriété est vraie pour tous les objets réels ou virtuels.
Natures différentes de l'objet et de son image par un miroir plan
Modèle:AlD'après ce qui précède, « un miroir plan donne d'un objet réel une image virtuelle » et Modèle:AlModèle:Transparent« d'un objet virtuel, une image réelle » ;
« un objet et son image conjuguée par miroir plan » sont donc de « natures différentes »[32].
Algébrisation physique de l'axe optique principal (associé à un objet ponctuel), algébrisation associée des plans transverses, orientation dissociée des plans d'incidence ou d'émergence
Modèle:AlL'algébrisation physique de l'axe optique principal associé à un objet ponctuel n'ayant pas encore été introduite en cours, l'est dans ce chapitre mais, ce n'est pas une notion spécifique au miroir plan, elle concerne tous les systèmes optiques qu'ils soient composés de dioptres ou de miroirs quelle que soit leur forme ; il en est de même des notions qui en découlent à savoir l'algébrisation associée des plans transverses et l'orientation dissociée des plans d'incidence ou d'émergence.
Algébrisation physique de l'axe optique principal (associé à un objet ponctuel)
Modèle:AlOn oriente l'axe optique principal « dans le sens de propagation de la lumière » ce qui donne, suivant la nature du système optique, les sens suivants :
Algébrisation physique de l'axe optique principal dans le cas d'un système dioptrique unidirectionnel
dans un système dioptrique « unidirectionnel »[33], l'axe optique principal est constitué de rayons incident, intermédiaires et émergent de même direction où les sens incident et émergent sont les mêmes[34], il n'y a donc qu'« un seul sens»[35] voir schémas ci-contre à droite,
Algébrisation physique de l'axe optique principal dans le cas d'un miroir
dans un système catadioptrique « unidirectionnel »[33], l'axe optique principal est là encore constitué de rayons incident et émergent de même direction[36] mais où les sens incident et émergent sont contraires[37], il y a donc « deux sens», « le sens incident » et « le sens émergent » voir schémas ci-contre à gauche[38].
Algébrisation physique de l'axe optique principal dans le cas d'un fibre optique courbée
Modèle:AlPour terminer un exemple où l'axe optique principal associé à un point objet n'est pas une succession de rayons incident, intermédiaires et émergent car la partie intermédiaire n'est pas constituée de rayons
Modèle:Alc'est l'exemple déjà cité de « fibre optique courbée » voir ci-contre,
Repérage d'un point objet ou d'un point image sur l'axe optique principal
Modèle:AlLa position d’un point objet ou celle d'un point image de l'axe optique principal « d'un dioptre ou d'un miroir »[39] est repérée par rapport à une « origine liée à la surface dioptrique ou réfléchissante » [40] sur laquelle tous les rayons incidents issus du point objet arrivent et de laquelle tous les rayons émergents repartent en direction du point image[41], le point commun du rayon incident et du rayon émergent correspondant étant le point d'incidence situé sur la surface dioptrique ou réfléchissante, voir schémas ci-dessous,
Repérage d'un point objet ou image sur l'axe optique principal d'un dioptre, lien entre la réalité ou la virtualité du point et le signe de son abscisse
Repérage d'un point objet ou image sur l'axe optique principal d'un miroir, lien entre la réalité ou la virtualité du point et le signe de son abscisse
Repérage d'un point objet ou image sur l'axe optique principal d'un prisme à réflexion totale, lien entre réalité ou virtualité du point et signe de son abscisse
Modèle:Aldans un système « dioptrique à plus d'un dioptre » ou « catadioptrique à un miroir et plusieurs dioptres »[43] ou « catadioptrique à plus d'un miroir ou surface réfléchissante »[44] ou encore, dans un système à axe optique principal possédant une portion courbée[45], que le système soit unidirectionnel ou polydirectionnel[46], la position d’un point objet ou d'un point image[41] de l'axe optique principal est repérée par rapport à une « origine liée à la face d'entrée ou la face de sortie »[47] en utilisant le « sens incident » ou le « sens émergent »[48], voir ci-dessus à droite sur l'exemple du prisme à réflexion totale.
Précautions à prendre lors de l'utilisation de l'algébrisation physique de l'axe optique principal d'un système pour lequel il y a plusieurs sens + définis sur l'axe optique principal
Modèle:AlDans le cas d'un miroir, une même position géométrique ayant une abscisse différente, suivant qu’elle est occupée par un point objet ou un point image, il faut préciser nettement s'il s’agit d'un point du rayon incident ou d'un point du rayon réfléchi et pour cela une façon consiste à rappeler « le sens d’orientation de la partie incidente ou réfléchie de l’axe optique principal » [49]en indice de la mesure algébrique considérée.
Orientation des espaces objets et images
Modèle:AlOrientant les « espaces objets » réels et virtuels « à droite »[50] et y choisissant une « base directe »[51] c.-à-d. déterminée par la « règle de la main droite »[52], l'orientation des espaces images Modèle:Nobr et virtuelles dépend du système optique considéré :
si le système optique est « dioptrique », les « espaces images » réelles et virtuelles sont « orientés à droite »[50] avec choix d'une « base directe »[51] c.-à-d. déterminé par la « règle de la main Modèle:Nobr image de la base directe des espaces objets réels et virtuels par le système dioptrique,
si le système optique est « catadioptrique »[53], les « espaces images » réelles et virtuelles sont « orientés à gauche »[50] avec choix d'une « base indirecte au sens de la physique»[54] c.-à-d. déterminée par la « règle de la main gauche »[55] la base indirecte au sens de la physique[54] des espaces images réelles et virtuelles est l'image de la base directe[51] des espaces objets Modèle:Nobr et virtuels par le système catadioptrique[53].
Modèle:AlRemarque : Si le système optique est catadioptrique avec plusieurs miroirs ou surfaces réfléchissantes[44], l'orientation des espaces images réelles et virtuelles dépend du nombre de miroirs ou de surfaces réfléchissantes[44] ;
après un nombre pair de réflexions, les « espaces images » réelles et virtuelles sont « orientés à droite »[50] avec choix d'une « base directe »[51] c.-à-d. déterminée par la « règle de la main Modèle:Nobr la base directe[51] des espaces images réelles et virtuelles est l'image de la base directe[51] des espaces objets réels et Modèle:Nobr par le système catadioptrique à nombre pair de réflexions,
après un nombre impair de réflexions, les « espaces images » réelles et virtuelles sont « orientés à gauche »[50] avec choix d'une « base indirecte au sens de la physique»[54] c.-à-d. déterminée par la « règle de la main gauche »[55] la base indirecte au sens de la physique[54] des espaces images réelles et virtuelles est l'image de la base directe[51] des espaces objets réels et virtuels par le système catadioptrique à nombre impair de réflexions.
Algébrisation associée des plans transverses
Modèle:AlL'axe optique principal du système optique étant algébrisé physiquement, le(s) vecteur(s) unitaire(s) associé(s) à cette algébrisation défini(ssen)t le 1er vecteur de base orientant l'espace objet ou image, les 2ème et 3ème vecteurs de base orthonormée orientant cet espace objet ou image définissant l'algébrisation des plans transverses de l'espace considéré, plus précisément :
si le système optique est « dioptrique unidirectionnel », l'axe optique principal n'ayant qu'une seule orientation, le vecteur unitaire associé est noté , les espaces objet et image étant tous deux « orientés à droite »[50] avec choix d'une « base orthonormée directe »[51] c.-à-d. déterminée par la « règle de la main droite »[52], nous la choisissons commune et la notons , ceci entraînant une algébrisation identique des plans transverses des espaces objet ou image[56] par ;
Algébrisation identique des plans transverses des espaces objets et images d'un miroir plan
si le système optique est « catadioptrique unidirectionnel », l'axe optique principal a une orientation différente suivant qu'il s'agit d'un point objet ou d'un point image, le vecteur unitaire associé de la partie incidente de l'axe optique principal étant noté , les espaces objets réel ou virtuel sont « orientés à droite »[50] avec choix d'une « base orthonormée directe »[51] notée , ceci entraînant l'algébrisation des plans transverses des espaces objets réel ou Modèle:Nobr par et le vecteur unitaire associé de la partie émergente de l'axe optique principal étant noté , les espaces images réelles ou virtuelles sont « orientés à gauche »[50] avec choix d'une « base orthonormée indirecte au sens de la physique»[54] c.-à-d. déterminée par la « règle de la main gauche »[55], notée [57], ceci entraînant la même algébrisation des plans transverses des espaces images réelles ou virtuelles par que celle des plans transverses des espaces objetsréels ou virtuels[56] voir schéma ci-contre dans l'exemple d'un miroir plan où est noté , noté et notés .
Modèle:AlRemarque : On rappelle que pour un système catadioptrique avec plusieurs miroirs ou surfaces réfléchissantes[44], l'orientation des espaces images réelles ou virtuelles dépend du nombre de miroirs ou de surfaces réfléchissantes[44] ; Modèle:AlModèle:Transparentaprès un nombre pair de réflexions, les « espaces images » réelles ou virtuelles sont « orientés à droite »[50] avec choix d'une « base orthonormée directe »[51], Modèle:AlModèle:Transparentaprès un nombre impair de réflexions, les « espaces images » réelles ou virtuelles sont « orientés à gauche »[50] avec choix d'une « base orthonormée indirecteModèle:Nobr sens de la physique»[54] ;
Modèle:AlModèle:Transparenttoutefois, dans les deux cas, les plans transverses des espaces objets ou images sont algébrisés selon la règle citée en introduction de ce paragraphe respectant l'orientation de l'espace auquel appartient le plan transverse considéré[58].
Orientation des plans d'incidence et d'émergence
Rappel de l'orientation des angles d'un plan d'un espace à trois dimensions
Modèle:AlL'espace étant « orienté à droite »[50] avec choix d'une base orthonormée « directe »[51] c.-à-d. déterminée par la « règle de la main droite »[52] ou
Modèle:AlModèle:Transparent« orienté à gauche »[50] avec choix d'une base orthonormée « indirecte au sens de la physique»[54] c.-à-d. déterminée par la « règle de la main gauche »[55],
Modèle:Alles angles d'un plan quelconque de cet espace sont orientés par un vecteur unitaire normal et
Modèle:Al et étant deux vecteurs non colinéaires quelconques du plan dont les angles sont orientés par , le signe de l'angle algébrisé se détermine par la règle suivante :
si « le trièdre est direct » c.-à-d. suivant la « règle de la main droite »[52] dans un espace « orienté à droite »[50] , si « le trièdre est indirect » c.-à-d. suivant la « règle de la main gauche »[55] dans un espace « orienté à droite »[50] ,
si « le trièdre est indirect au sens de la physique» c.-à-d. suivant la « règle de la main gauche »[55] dans un espace « orienté à gauche »[50] , si « le trièdre est direct au sens de la physique» c.-à-d. suivant la « règle de la main droite »[52] dans un espace « orienté à gauche »[50] .
Orientation des plans d'incidence et d'émergence
Modèle:AlSi le système optique est « unidirectionnel », les plans d'incidence et d'émergence sont confondus et il est souhaitable comme cela a été fait pour la réfraction et la réflexion de définir un « même sens d'orientation des angles » ;
si le système est « dioptrique unidirectionnel », l'axe optique principal n'a qu'« une seule orientation de vecteur unitaire noté », les espaces objet et image sont tous deux « orientés à droite »[50] avec choix d'une base « directe commune »[51] c.-à-d. déterminée par la « règle de la main droite »[52] «» et Modèle:Transparentsi le plan d'incidence est le plan , le plan d'émergence est aussi , tous les deux étant à , le choix d'orienter les angles de ce plan par « le sens des angles de ce plan est de vers » car « est direct »[59] ;
si le système est « catadioptrique unidirectionnel », la partie incidente de l'axe optique principal est orientée par le vecteur de base 1er vecteur de la base des espaces objets « orientés à droite »[50], base choisie « directe »[51] c.-à-d. déterminée par la « règle de la main droite »[52] alors que Modèle:Transparentsa partie émergente par le vecteur de base 1er vecteur de la base des espaces images « orientés à gauche »[50], base choisie « indirecte Modèle:Nobr sens de la physique »[54] c.-à-d. déterminée par la « règle de la main gauche »[55] et Modèle:Transparentsi le plan d'incidence est le plan , le plan d'émergence est le plan , tous deux étant à , le choix d'orienter les angles de ce plan commun par aurait pour conséquences : Modèle:Transparent« le sens des angles du plan d'incidence est de vers » car « est direct »[59] suivant la « règle de la main droite »[52] dans un espace « orienté à droite »[50] mais Modèle:Transparent« le sens des angles du plan d'émergence étant, avec le choix d'orientation par , de vers » car « est indirect au sens de la physique»[59] suivant la « règle de la main gauche »[55] dans un espace « orienté à gauche »[50], ce sens des angles du plan d'émergence serait le sens des angles du plan d'incidence, ce qui n'est pas ce que nous souhaitions, aussi Modèle:AlModèle:Transparent« les angles du plan d'incidence étant orientés par » c.-à-d. « de vers », Modèle:AlModèle:Transparent« les angles du plan d'émergence doivent être orientés par » c.-à-d. « de vers » même orientation que « de vers »[60] ceci étant en accord avec « indirect au sens de la physique»[61] suivant la « règle de la main gauche »[55] dans un espace « orienté à gauche »[50].
Relation de conjugaison de position de Descartes d'un miroir plan
Repérage « physique » de Descartes
Modèle:AlOn choisit comme « origine des parties incidente et réfléchie de l'axe optique principal » « le sommet du miroir plan associé à cet axe optique principal» et, Modèle:Alpour rappeler que les sens des parties incidente et réfléchie de l'axe optique principal sont différents dans l'algébrisation de l'axe optique principal, Modèle:Alon notera l'abscisse « physique » de Descartes[19] du point objet par «»[62] ainsi que Modèle:AlModèle:Transparentl'abscisse « physique » de Descartes[19] du point image par «»[62].
Relation de conjugaison de position (ou 1ère relation de conjugaison) de Descartes d'un miroir plan
Bien qu'il s'agisse d'une conjugaison rigoureuse, il n'est pas d'usage de le rappeler dans le nom de la relation.
Modèle:AlOn utilise le fait que « les points conjugués par un miroir plan sont symétriques par rapport à ce dernier » ce qui entraîne qu'ils ont des abscisses « physiques » de Descartes[19] de même valeur absolue Modèle:Nobr «» ;
si « le point objet est réel », est situé avant le sommet «» et « le point image , symétrique de par rapport au miroir plan, est virtuel », étant alors situé avant le sommet sur le rayon réfléchi «» d'où l'égalité des abscisses « physiques » de Descartes[19],
si « le point objet est virtuel », est situé après le sommet «» et « le point image , symétrique de par rapport au miroir plan, est réel », étant alors situé après le sommet sur le rayon réfléchi «» d'où l'égalité des abscisses « physiques » de Descartes[19] ;
Grandissement transverse d'un objet linéique transverse, relation de conjugaison de grandissement transverse de Descartes d'un miroir plan
Définition du grandissement transverse d'un objet linéique transverse dans le cas d'un système optique « unidirectionnel » aplanétique
Le contenu de ce paragraphe s'applique à tout système dioptrique ou catadioptrique « unidirectionnel » aplanétique, il n'est pas spécifique à un miroir plan.
Modèle:AlPour un système optique « unidirectionnel », les plans transverses de l'espace image sont
à ceux de l'espace objet et, dans le cas d'aplanétisme
à ce dernier »[65] on définit le grandissement transverse de cet objet linéique transverse par
«» nombre sans dimension, «» et «» étant les longueurs algébrisées respectivement de l'objet et de l'image selon le vecteur de base commun ou [66] des plans transverses ;
Modèle:Alsuivant le signe du grandissement transverse, on déduit le sens de l'image relativement à l'objet :
«si est », « l'image est dans le même sens que l'objet », on parle alors d'image « droite »,
«si est », « l'image est dans le sens contraire de l'objet », on parle alors d'image « inverse »[67].
Relation de conjugaison de grandissement transverse (ou 2ème relation de conjugaison) de Descartes d'un miroir plan
Bien qu'il s'agisse d'une conjugaison rigoureuse, il n'est pas d'usage de le rappeler dans le nom de la relation.
Modèle:Al« L'image étant symétrique de l'objet par rapport au miroir plan » avec « objet et image » tous deux au miroir, « l'image est dans le même sens que l'objet et de même dimension » ;
Modèle:Alde cette dernière affirmation « l'image de même dimension que l'objet » on tire que « le grandissement transverse est de valeur absolue égale à » et
Modèle:Alde la première affirmation Modèle:Al« l'image de même sens que l'objet » Modèle:AlModèle:Transparentque « le grandissement transverse est positif » les plans transverses objets et images étant orientés par les mêmes vecteurs de base d'où :
Modèle:All'expression de la relation de conjugaison de grandissement transverse
Grandissement angulaire d'un pinceau lumineux, relation de Lagrange-Helmholtz
Les deux 1ers paragraphes ci-dessous s'appliquent à tout système dioptrique ou catadioptrique « unidirectionnel » aplanétique, ils ne sont pas spécifiques à un miroir plan.
Repérage d'un pinceau incident ou émergent
Modèle:AlUn pinceau étant la matérialisation pratique d'un rayon, on le repère par l'angle orienté que fait sa direction de propagation avec celle de même nature sur l'axe optique principal[70], ainsi :
dans un système dioptrique « unidirectionnel », un pinceau incident de direction de propagation est repéré par l'angle «» du plan d'incidence « orienté de vers »[71], « étant le vecteur unitaire orientant l'axe optique principal », « et algébrisant les plans transverses » et « la base directe » commune choisie dans les espaces objets et images tous deux « orientés à droite »[50]Modèle:,[51] la base étant déterminée par la « règle de la main droite »[52] ; Modèle:Transparentun pinceau émergent de direction de propagation est repéré par l'angle «» du plan d'émergence « orienté de vers »[71] ;
dans un système catadioptrique « unidirectionnel » voir un exemple ci-dessous à droite, le miroir plan ; repérage d'un pinceau incident et du pinceau émergent correspondant, Modèle:Transparentun pinceau incident de direction de propagation est repéré par l'angle « » du plan d'incidence orienté de « vers »[72], « étant le vecteur unitaire orientant la partie incidente de l'axe optique principal », « et algébrisant les plans transverses » et Modèle:Nobr la base directe » choisie dans les espaces objets « orientés à droite »[50]Modèle:,[51] la base étant déterminée par la « règle de la main droite »[52] ; Modèle:Transparentun pinceau émergent de direction de propagation est repéré par l'angle «» du plan d'émergence orienté de « vers »[73], « étant le vecteur unitaire orientant la partie émergente de l'axe optique principal », « et algébrisant les plans transverses » et Modèle:Nobr la base indirecte au sens de la physique choisie dans les espaces images orientés à gauche »[50]Modèle:,[54] la base étant déterminée par la « règle de la main gauche »[55].
Définition du grandissement angulaire d'un pinceau lumineux issu d'un point objet
Schéma de définition du grandissement angulaire, par un miroir plan, d'un pinceau lumineux issu d'un point objet
Modèle:AlAyant défini, dans un « système dioptrique ou catadioptrique unidirectionnel » voir le schéma ci-contre pour un système catadioptrique Modèle:Nobr
l'angle d'inclinaison de la direction du pinceau incident issu du point objet ainsi que
l'angle d'inclinaison de la direction du pinceau émergent du point image ,
Modèle:Altous deux comptés positivement selon le « même sens
», on appelle
« grandissement angulaire du pinceau lumineux issu du point objet , noté » le rapport algébrique «» nombre sans dimension.
Valeur du grandissement angulaire d'un pinceau lumineux issu d'un point objet par un miroir plan
étant égal à l'angle de réflexion du rayon médian du pinceau émergent et
à l'angle d'incidence du rayon médian du pinceau incident, ces deux angles obéissant à la 2ème loi de Snell-Descartes[18]Modèle:,[19] de la réflexion[21]
, Modèle:Alon en déduit le grandissement angulaire cherché soit
Lien entre le grandissement transverse d'un objet linéique transverse et le grandissement angulaire d'un pinceau lumineux issu du point objet pied de l'objet linéique transverse par un miroir plan, relation de Lagrange-Helmholtz
Modèle:AlAyant établi que le grandissement transverse par un miroir plan d'un objet linéique transverse de pied
Sensibilisation de l'utilisation de la relation de Lagrange-Helmholtz à un système catadioptrique, exemple d'un miroir sphérique concave
Il ne s'agit pas d'étudier dans les détails toutes les propriétés des « miroirs sphériques »[78], mais uniquement d'« utiliser les lois de Snell–Descartes de la réflexion »[20]Modèle:,[21] appliquées à un « miroir sphérique concave» pour souligner l'intérêt de la « relation de Lagrange-Helmholtz »[75]Modèle:,[76].
Modèle:AlComme nous l'avons évoqué en note « 77 » plus haut dans ce chapitre, la « relation de Lagrange-Helmholtz »[75]Modèle:,[76] n'a aucun intérêt pour un miroir plan, par contre Modèle:AlModèle:Transparentelle en acquiert un pour un « miroir sphérique ».
Modèle:AlOn construit le rayon réfléchi sur le miroir sphérique du rayon incident issu du point objet réel de l'axe optique principal, rayon incident incliné de relativement à la partie incidente de l'axe optique principal Modèle:AlModèle:Transparentpar utilisation de la 1ère et 2ème loi de Snell–Descartes[18]Modèle:,[19] de la réflexion[20]Modèle:,[21], Modèle:AlModèle:Transparentl'intersection de l'axe optique principal et du rayon réfléchi incliné de relativement à la partie réfléchie de l'axe optique principal définit le point image réel ;
Modèle:Alon construit le point image du point objet réel , extrémité située hors axe optique principal de l'objet linéique transverse , Modèle:AlModèle:Transparenten utilisant le rayon incident issu de et passant par le centre de courbure , rayon qui se réfléchit sur lui-même, et, Modèle:AlModèle:Transparentcompte-tenu de l'aplanétisme approché, le point image ayant pour pied sur l'axe optique principal le point image est le point réel du rayon réfléchi se projetant orthogonalement sur l'axe optique principal en ;
Modèle:Alon observe que l'image est inversée par rapport à l'objet et que la taille de la 1ère est inférieure à celle du 2ème d'où Modèle:AlModèle:Transparent« le grandissement transverse » d'une part Modèle:AlModèle:Transparentque les angles et de même signe sont tels est supérieur à d'où Modèle:AlModèle:Transparent« le grandissement angulaire » d'autre part, Modèle:All'observation graphique de ces résultats est donc conforme à la « relation de Lagrange-Helmholtz »[75]Modèle:,[76] laquelle, bien sûr, nécessiterait d'être démontrée
Notes et références
↑ Dans un système « dioptrique » à direction de propagation « unidirectionnelle », la lumière émergente est dans le « même sens » que la lumière incidente.
↑ Dans un système « catadioptrique » à direction de propagation « unidirectionnelle », la lumière émergente est dans le « sens contraire » de la lumière incidente ; Modèle:Alon prolonge la définition des systèmes « catadioptriques » en permettant qu'ils contiennent plus d'un miroir ; Modèle:Aldans le cas où la propagation est « unidirectionnelle » par abus on parle encore de système « catadioptrique unidirectionnel »,
si le nombre de miroirs est pair, le système catadioptrique est équivalent à un système dioptrique car le sens émergent est identique au sens incident et
si le nombre de miroirs est impair, le système catadioptrique est équivalent à un miroir, le sens émergent étant opposé au sens incident.
↑ Dans ce cas l'objet peut « absorber puis réémettre » ou « réfléchir » la lumière reçue, pour éviter les complications on dira que l'objet « émet la lumière qu'il a reçu».
↑ Ce n'est pas la définition la plus générale qui est énoncée ci-après mais celle qui est donnée est applicable à tous les systèmes à l'exception d'une fibre optique courbée.
↑ Ce rayon ainsi que son prolongement « virtuel » au-delà de la face d'entrée définit la partie incidente de l'axe optique principal.
↑ Le rayon émergent ainsi que son prolongement « virtuel » en-deçà de la face de sortie définit la partie émergente de l'axe optique principal.
↑ 10,0 et 10,1 On a supposé que le faisceau incident issu du point objet donnait un faisceau convergent en un point , ceci n'est vrai que pour le miroir plan, pour les autres la convergence n'est pas ponctuelle pour une ouverture non petite
↑ Pour une fibre optique courbée la définition d'un axe optique principal associé à un point objet doit être celle qui est donnée en remarque ci-dessous.
↑ Cette définition englobe la définition précédente et n'est vraiment utile que pour une fibre optique courbée pour laquelle la définition précédente ne s'applique pas.
↑ Principal ou secondaire associé à un point objet.
↑ Le stigmatisme rigoureux d'un système optique pour tous les points objets est très rare ; comme nous le verrons, le miroir plan en est un exemple mais c'est en fait le seul.
↑ 19,0019,0119,0219,0319,0419,0519,0619,0719,0819,09 et 19,10René Descartes (1596 - 1650) mathématicien, physicien et philosophe français, considéré comme l'un des fondateurs de la philosophie moderne, en physique a contribué à l'optique géométrique et en mathématiques est à l'origine de la géométrie analytique.
↑ Pour créer un point objet virtuel relativement au miroir plan, on crée un point image réelle par un 1er système optique d'une source ponctuelle on crée donc un point de convergence réelle par ce 1er système optique d'un faisceau provenant d'une source ponctuelle , mais on empêche la convergence réelle en en interposant le miroir plan avant , le faisceau rencontrant maintenant la face d'entrée du miroir avant son point de convergence , ce dernier devient virtuel.
↑ On peut dire aussi qu'un point double est un point objet qui est sa propre image par le système optique.
↑ Le miroir plan étant la « face d'entrée » du système optique, si on définit l'espace objet réel comme l'espace strictement situé en-deçà du miroir plan dans le sens incident et l'espace objet virtuel comme l'espace strictement situé au-delà du miroir plan dans le sens incident, les deux espaces objets n'ayant pas d'intersection, un objet est donc soit réel, soit virtuel ; Modèle:Alde même le miroir plan étant la « face de sortie » du système optique, si on définit l'espace image réelle comme l'espace strictement situé en-deçà du miroir plan dans le sens réfléchi et l'espace image virtuelle comme l'espace strictement situé au-delà du miroir plan dans le sens réfléchi, les deux espaces images n'ayant pas d'intersection, une image est donc soit réelle, soit virtuelle ; Modèle:Alavec cette définition, le point objet situé au sommet du miroir n'a ni caractère réel, ni caractère virtuel et il en est de même du point image positionné au sommet du miroir, ce qui, mettant le sommet à part relativement aux autres objets ou aux autres images, n'est pas satisfaisant ; Modèle:Alen fait il est impossible de mettre une source ponctuelle exactement sur le miroir, le plus simple pour essayer de réaliser l'expérience avec un point objet sur le miroir plan est de créer, par un autre système optique, une image ponctuelle qui servira d'objet pour le miroir et de positionner ce dernier sur mais dans la pratique le miroir sera très légèrement au-delà de dans le sens incident rendant réel ou très légèrement en-deçà de dans le sens incident rendant virtuel, aussi est-il possible de considérer qu'en théorie sur le miroir est réel à et virtuel à ainsi que son image par le miroir confondue avec est à la fois virtuelle à et réelle à si en pratique le miroir est très légèrement au-delà de dans le sens incident rendant réel, l'image de ce dernier par le miroir sera très légèrement en-deçà du miroir dans le sens réfléchi rendant l'image virtuelle et si en pratique le miroir est au contraire très légèrement en-deçà de dans le sens incident rendant virtuel, l'image de ce dernier par le miroir sera très légèrement au-delà du miroir dans le sens réfléchi rendant l'image réelle d'où l'intérêt de donner une autre définition des espaces objets réel et virtuel ainsi que des espaces images réelle et virtuelle d'un miroir plan permettant de ne plus particulariser le sommet du miroir sur un axe optique principal quelconque ; Modèle:Alpour cela il suffit de considérer que la « face d'entrée » appartient à la fois aux espaces objet réel et objet virtuel et que la « face de sortie » appartient à la fois aux espaces image réelle et image virtuelle, dans ces conditions le point double « sommet du miroir plan pour l'axe optique principal considéré » situé sur le miroir dans l'intersection des espaces objet réel et image virtuelle ou des espaces objet virtuel et image réelle est bien tel que l'objet et l'image par le miroir plan sont confondues en étant de nature différente.
↑ Sur la figure considérée, les rayons réfléchis de point d'incidence respectif et ont été décalé relativement aux rayons incidents pour une question de lisibilité du schéma.
↑ Pour que le point à l'infini sur l'axe optique principal soit un point double, il faut admettre qu'il est à la fois réel et virtuel les points conjugués par un miroir plan étant de nature différente c.-à-d. considérer Modèle:Alque l'espace objet réel c.-à-d. l'espace objet situé en-deçà de la face d'entrée du miroir dans le sens incident et à l'espace image virtuelle c.-à-d. l'espace image situé en-deçà de la face de sortie du miroir dans le sens émergent se rejoignent à l'infini ou que l'espace objet virtuel c.-à-d. l'espace objet situé au-delà de la face d'entrée du miroir dans le sens incident et à l'espace image réelle Modèle:Nobr l'espace image situé au-delà de la face de sortie du miroir dans le sens émergent se rejoignent aussi à l'infini ou encore, Modèle:Alqu'une droite en tant que « limite d'un cercle dont le centre est situé perpendiculairement à la droite à une distance tendant vers l'infini, le rayon du cercle tendant également vers l'infini » est une courbe qui se ferme à l'infini le cercle dont la droite est la limite étant une courbe fermée.
↑ Un « objet étendu à deux dimensions » étant une « juxtaposition continue d'objets étendus à une dimension indépendants » et un « objet étendu à trois dimensions », une « juxtaposition continue d'objets étendus à deux dimensions indépendants ».
↑ L'image «» étant composée d'images ponctuelles est donc « nette ».
↑ On rappelle qu'en englobant dans l'espace objet réel et l'espace objet virtuel, la face d'entrée du miroir, de même Modèle:AlModèle:Transparentqu'en englobant dans l'espace image réelle et l'espace image virtuelle, la face de sortie du miroir, Modèle:Alle point double « sommet du miroir sur l'axe optique principal considéré » peut être considéré comme un objet réel, son image confondue avec lui étant alors virtuelle ou Modèle:AlModèle:Transparentconsidéré comme un objet virtuel, son image confondue avec lui étant alors réelle ; de même Modèle:Alle point double « point à l'infini sur l'axe optique principal associé » le point à l'infini d'une droite étant considéré comme le point de fermeture de la droite, limite d'un cercle dont le centre est situé perpendiculairement à la droite à une distance tendant vers l'infini, le rayon du cercle tendant également vers l'infini Modèle:AlModèle:Transparentpeut être considéré comme un objet réel, son image confondue avec lui étant alors virtuelle ou Modèle:AlModèle:Transparentconsidéré comme un objet virtuel, son image confondue avec lui étant alors réelle.
↑ 33,0 et 33,1 Le qualificatif « unidirectionnel » appliqué à un système dioptrique ou catadioptrique signifiant que ce système dioptrique ou catadioptrique est à « axe optique principal unidirectionnel » ; Modèle:Alavec la définition pratique de l'axe optique principal applicable à pratiquement tous les systèmes à l'exception des fibres optiques courbées, l'axe optique principal est constitué de rayons ayant tous même support.
↑ L'application de cette propriété se prolonge aux systèmes catadioptriques unidirectionnels à nombre pair de miroirs.
↑Algébrisation physique de l'axe optique principal dans le cas d'un périscope Dans un système catadioptrique polydirectionnel comme celui du système optique formant un périscope le système est qualifié de catadioptrique car on observe des réflexions totales, l'axe optique principal est constitué
de rayon incident à la face d'entrée, de rayon intermédiaire de même direction et de même sens que le rayon incident avant la 1ère réflexion totale,
de rayons intermédiaires de direction au rayon incident après la 1ère réflexion,
de rayon intermédiaire de même direction et de même sens que le rayon incident après la 2ème réflexion totale, de rayon émergent de même direction et de même sens que le rayon incident,
Modèle:Alon dénombre donc « deux sens »,
Modèle:Al le sens incident ou émergent ainsi qu'intermédiaire juste avant le 1ère réflexion totale ou juste après la 2ème et
Modèle:Al le sens pour les rayons intermédiaires correspondant à une rotation de en valeur absolue relativement au sens commun précédent.
↑ Si le système catadioptrique contient des dioptres intermédiaires les faces d'entrée et de sortie étant les faces d'un miroir, les dioptres séparant des espaces optiques intermédiaires, en plus des rayons incident et émergent il y a des rayons intermédiaires mais pour un système « unidirectionnel » les rayons intermédiaires sont de même direction que les rayons incident et émergent ; Modèle:Alsi au contraire le miroir est intermédiaire il y a également en plus des rayons incident et émergent aboutissant ou issu des dioptres extrêmes, des rayons intermédiaires dont ceux aboutissant et issu du miroir, tous ces rayons ayant même direction.
↑ Si le système catadioptrique « unidirectionnel » contient des dioptres intermédiaires, il y a des rayons intermédiaires de même direction que les rayons incident et émergent ; le sens des rayons intermédiaires est alors identique au sens incident ; Modèle:Alsi au contraire le miroir est intermédiaire il y a donc des rayons intermédiaires de même direction que les rayons incident et émergent, le sens des rayons intermédiaires avant le miroir étant identique au sens incident et celui des rayons intermédiaires après le miroir identique au sens émergent.
↑Algébrisation physique de l'axe optique principal dans le cas d'une équerre optique Dans un système catadioptrique polydirectionnel comme dans le cas d'un prisme à réflexion totale formant une équerre optique voir schéma ci-contre à droite Modèle:Nobr système est qualifié de catadioptrique car on observe des réflexions totales, dans le cas d'une équerre optique on n'en observe qu'une, Modèle:AlModèle:Transparent« il y a deux sens », Modèle:AlModèle:Transparentle sens incident et Modèle:AlModèle:Transparentle sens émergent, Modèle:AlModèle:Transparentle sens du rayon intermédiaire avant réflexion étant identique au sens incident et celui du rayon intermédiaire après réflexion identique au sens émergent ;
Algébrisation physique de l'axe optique principal dans le cas d'un prisme à réflexion totale un autre exemple de système catadioptrique polydirectionnel est le cas du prisme à réflexion totale dans lequel on observe deux réflexions totales voir schéma ci-contre à gauche exposant l'algébrisation physique de l'axe optique principal dans le cas d'un prisme à réflexion totale, il y a alors « trois sens »,
le sens incident pour les rayons incident et intermédiaire avant la 1ère réflexion totale,
le sens intermédiaire correspondant à une rotation de en valeur absolue relativement au sens incident pour le rayon intermédiaire après la 1ère réflexion totale et avant la 2ème,
le sens émergent opposé au sens incident pour les rayons émergent et intermédiaire après la 2ème réflexion totale.
↑ Avec un dioptre ou un miroir, l'axe optique principal associé à un point objet est constitué
du rayon incident issu du point objet à la surface dioptrique ou réfléchissante et
du rayon émergent de même direction et de même sens que le rayon incident pour un dioptre ou de sens contraire pour un miroir.
↑ Le plus souvent on choisit le sommet de la surface dioptrique ou réfléchissante, c.-à-d. l'intersection de cette dernière avec l'axe optique principal.
↑ 41,0 et 41,1 Pour définir un couple de points conjugués, il faut bien sûr que le système optique soit stigmatique rigoureux pour le point objet.
↑ Seul le cas d'un objet réel et d'une image virtuelle a été représenté l'image n'étant a priori pas celle de l'objet positionné ; Modèle:Alsi l'objet était virtuel il serait au-delà du miroir sur la partie incidente de l'axe optique principal donc à droite et si l'image envisagée était réelle elle serait au-delà du miroir sur la partie réfléchie de l'axe optique principal donc à gauche.
↑ Dans ce cas le miroir ne pouvant constituer la face d'entrée sinon les dioptres ne seraient pas utilisés, le système optique comprend au moins deux dioptres, celui dont la surface dioptrique sert de face d'entrée aboutissant directement ou par l'intermédiaire d'autres dioptres au miroir lequel, par retour inverse de la lumière, renvoie directement ou par l'intermédiaire des dioptres inverses vers le dioptre inverse de celui d'entrée, la surface dioptrique de ce dioptre inverse servant de face de sortie.
↑ 44,044,144,244,3 et 44,4 Une surface réfléchissante qui n'est pas un miroir étant par exemple une surface dioptrique sur laquelle on observe une réflexion totale.
↑ C.-à-d. que l'axe optique principal soit constitué de rayons de même direction ou de directions différentes.
↑ Le plus souvent on choisit le sommet de la face d'entrée, c.-à-d. l'intersection de cette dernière avec l'axe optique principal pour repérer un point objet et Modèle:AlModèle:Transparentle sommet de la face de sortie, c.-à-d. l'intersection de cette dernière avec l'axe optique principal pour repérer un point image.
↑ Le sens incident servant à repérer le point objet et le sens émergent à repérer le point image.
↑ Dans le cas où le miroir est vertical avec l'espace objet réel sur sa gauche, le sens incident est et le sens réfléchi ; Modèle:AlModèle:Transparentsi le miroir est retourné, l'espace objet réel étant maintenant sur sa droite, le sens incident devient et le sens réfléchi ; Modèle:AlModèle:Transparentsi le miroir est horizontal avec l'espace objet réel au-dessus, le sens incident est et le sens réfléchi etc
↑ 52,0052,0152,0252,0352,0452,0552,0652,0752,08 et 52,09 Levant le pouce de la main droite dans le sens du 1er vecteur, l'index pointant dans le sens du 2ème vecteur, « le sens du 3ème vecteur est donné par le majeur courbé vers la paume de la main droite » ceux qui se souviennent de leur enfance pourraient encore appeler cette règle « la règle de l'apprenti cow-boy droitier » ; il existe d'autres règles équivalentes :
Modèle:Al« règle de l'auto-stoppeur (droitier) » : l'avant bras droit étant dans le sens du 1er vecteur, la poigne de la main droite courbée dans le sens du 2ème vecteur, le pouce est alors levé dans le sens du 3ème vecteur, Modèle:Al« règle du tire-bouchon de Maxwell » : le tire-bouchon tournant du 1er vecteur vers du 2ème, il s'enfonce dans le bouchon fixe dans le sens de du 3ème vecteur, Modèle:Al« règle du bonhomme d'Ampère » : le bonhomme d'Ampère se couchant sur la direction du 1er vecteur, ce vecteur lui entrant par les pieds et lui sortant par la tête, regardant droit devant dans le sens du 2ème vecteur, il tend le bras gauche perpendiculairement à son corps dans le sens du 3ème vecteur, Modèle:Aletbien d'autres règles que vous pouvez vous-même inventer. Modèle:AlJames Clerk Maxwell (1831 - 1879) physicien et mathématicien écossais, principalement connu pour ses équations unifiant l'électricité, le magnétisme et l'induction ainsi que pour l'établissement du caractère électromagnétique des ondes lumineuses, mais aussi pour sa distribution des vitesses utilisée dans une description statistique de la théorie cinétique des gaz ; le tire-bouchon fictif permettant de déterminer le caractère direct d'un triplet de vecteurs a été baptisé « tire-bouchon de Maxwell » en son honneur. Modèle:AlAndré-Marie Ampère (1775 - 1836), mathématicien, physicien, chimiste et philosophe français, peut être considéré comme l'un des premiers artisans de la mathématisation de la physique, il a édifié les fondements théoriques de l'électromagnétisme et a découvert les bases de l'électronique de la matière ; c'est lui qui inventa le bonhomme fictif portant son nom et permettant de déterminer le caractère direct d'un triplet de vecteurs.
↑ 53,0 et 53,1 Au sens premier du terme, c.-à-d. contenant un miroir et éventuellement des dioptres.
↑ 55,0055,0155,0255,0355,0455,0555,0655,0755,08 et 55,09 Levant le pouce de la main gauche dans le sens du 1er vecteur, l'index pointant dans le sens du 2ème vecteur, « le sens du 3ème vecteur est donné par le majeur courbé vers la paume de la main gauche » pourraient encore être appelée « la règle de l'auto-stoppeur gaucher ».
↑ 56,0 et 56,1 On peut faire la comparaison de l'algébrisation des plans transverses des espaces objets et celle des plans transverses des espaces images car ces derniers sont parallèles dans un système optique unidirectionnel.
↑ Le vecteur unitaire étant égal à , les bases et ont des orientations opposées, la 1ère étant directe, la 2ème est donc indirecte au sens de la physique.
↑ Néanmoins l'algébrisation des plans transverses des espaces objets réels ou virtuels et celle des plans transverses des espaces images réelles ou virtuelles ne peuvent être comparées que si les plans transverses sont .
↑ 59,059,1 et 59,2 Toute permutation circulaire sur une base conservant son caractère direct ou indirect.
↑ En effet un sens de vers est aussi le sens de vers .
↑ En effet le trièdre «» étant indirect, une permutation circulaire conduit à «» indirect puis une permutation entre le 2ème et le 3ème vecteur à un trièdre direct et enfin le remplacement du 1er vecteur par son opposé le retour à un trièdre indirect.
↑ 62,0 et 62,1 Dans la mesure où le miroir est vertical avec l'espace objet réel à gauche du miroir plan, le sens incident est et le sens réfléchi ; Modèle:Albien entendu les indices doivent être adaptées à la situation du miroir plan par exemple : Modèle:AlModèle:Transparentsi le miroir est horizontal avec l'espace objet réel au-dessus du miroir plan, le sens incident est et le sens réfléchi
↑ On peut utiliser cette relation pour déterminer la position du point image connaissant celle du point objet ou vice versa ; Modèle:Altoutefois, en ce qui concerne le miroir plan, les positions respectives d'un objet et de son image sont suffisamment simples à déterminer géométriquement les deux étant symétriques l'un de l'autre par rapport au miroir plan pour qu'on n'utilise pas, dans la pratique, la relation de conjugaison de position de Descartes pour le faire.
↑ étant sur l'axe optique principal définissant le sommet du miroir plan servant d'origine du repérage « physique » de Descartes, étant en dehors, la conjugaison donne sur l'axe optique principal et en dehors ; les points et sont encore appelés respectivement « pied » de l'objet linéique transverse et « pied » de l'image linéique transverse .
↑ L'aplanétisme rigoureux pour un couple de points conjugués signifie simplement que l'image de l'objet linéique transverse est linéique transverse, mais a priori l'image pourrait ne pas être dans le plan contenant l'objet et l'axe optique principal ; Modèle:Alla raison pour laquelle l'image est à l'objet est que tout plan d'émergence est géométriquement confondu avec le plan d'incidence correspondant, ceci étant une conséquence de la « 1ère loi de Snell-Descartes de la réflexion » ou de la « 1ère loi de Snell-Descartes de la réfraction » du chap. de la leçon « Signaux physiques (PCSI) » l'image est dans le plan contenant l'objet et l'axe optique principal.
↑ Le grandissement transverse est donc indépendant de la position de l'objet par rapport au miroir ainsi que de sa taille.
↑ On peut utiliser cette relation pour déterminer la taille de l'image linéique transverse connaissant celle de l'objet linéique transverse ou vice versa ; Modèle:Altoutefois, en ce qui concerne le miroir plan, les grandeurs respectives d'un objet et de son image sont suffisamment simples à déterminer géométriquement les deux étant de même taille pour qu'on n'utilise pas, dans la pratique, la relation de conjugaison de grandissement transverse de Descartes pour le faire.
↑ C.-à-d. qu'un pinceau incident sera repéré par rapport à la partie incidente de l'axe optique principal et Modèle:AlModèle:Transparentqu'un pinceau émergent sera repéré par rapport à la partie émergente de l'axe optique principal.
↑ Le vecteur orientant les angle du plan d'émergence étant en accord avec « indirecte au sens de la physique» des espaces images orientés à gauche, ceci ayant pour conséquence que le plan d'émergence est orienté dans le même sens que le plan d'incidence ; Modèle:Alon rappelle, d'une part, que le caractère « indirect au sens de la physique» de la base d'un espace orienté à gauche suit la règle de la main gauche et, Modèle:AlModèle:Transparentd'autre part, que le lien entre le vecteur normal orientant le plan et le sens des angles du plan dans un espace orienté à gauche suit la règle du tire-bouchon des farces et attrapes ou du tire-bouchon pour gaucher.
↑ Le grandissement angulaire d'un pinceau lumineux issu d'un point objet par un miroir plan est donc indépendant de la position de l'objet par rapport au miroir ainsi que de l'inclinaison du pinceau incident issu du point objet.
↑ 75,075,175,275,3 et 75,4Joseph Louis Lagrange (1736 - 1813) mathématicien, mécanicien et astronome italien, naturalisé français vers la fin du XVIIIème siècle son nom italien était Giuseppe Luigi Lagrangia ; Modèle:Alon lui doit, entre autres, d'avoir jeté en mathématiques les bases du calcul variationnel, calcul qu'il appliqua en mécanique pour résoudre quelques problèmes propagation du son, corde vibrante, librations de la Lune c.-à-d. petites variations de son orbite ; Modèle:Alen , alors installé à Paris, il publia son livre de mécanique analytique dont le formalisme a permis, un siècle et demi plus tard, l'ébauche de la mécanique quantique, il est aussi l'un des pères du système métrique et de la division décimale des unités ; Modèle:Alon remarquera que le domaine de l'optique n'est pas pour Lagrange un domaine privilégié ni pour Helmholtz non plus !
↑ On admet que cette relation est applicable à tout système catadioptrique unidirectionnel dont le miroir plan n'est qu'un exemple très particulier ; Modèle:Alappliquée à un miroir plan la relation de Lagrange - Helmholtz n'a aucun intérêt car elle donne moins d'informations que n'en donnent les deux valeurs des grandissements transverse et angulaire prises indépendamment l'une de l'autre ; Modèle:Alla relation acquiert de l'intérêt pour des systèmes catadioptriques unidirectionnels pour lesquels les grandissements transverses et angulaires dépendent de la position de relativement à la surface réfléchissante, comme l'exemple des miroirs sphériques : la relation nous informe alors que
d'une part les grandissements sont toujours de signe contraire et
d'autre part plus le grandissement transverse est grand en valeur absolue plus l'image est de grande dimension par rapport à celle de l'objet, plus le grandissement angulaire est petit en valeur absolue plus les faisceaux émergents sont resserrés relativement aux faisceaux incidents.
↑ Ces derniers ne figurant pas au programme de physique de P.C.S.I..
↑ Il y a stigmatisme rigoureux du miroir sphérique pour un autre point « le sommet du miroir ».
↑ Il y a aussi un autre point double du miroir sphérique « son sommet ».
↑ 81,081,181,2 et 81,3Carl Friedrich Gauss (1777 - 1855), mathématicien, astronome et physicien allemand, est considéré comme l'un des plus grands mathématiciens de tous les temps il fut surnommé « le prince des mathématiciens », on lui doit d'importantes contributions dans les trois domaines. Modèle:AlEn , à l'âge de dix-neuf ans, Gauss caractérisa presque complètement tous les polygones réguliers constructibles à la règle et au compas et il demanda par la suite qu'un heptadécagoneModèle:Nobr régulier de côtés soit gravé sur son tombeau ; bien d'autres découvertes de mathématiques lui sont dues dont, en particulier, en la 1ère démonstration de la loi de réciprocité quadratique conjecturée par Euler en un nombre premier est congru à un carré de nombre entier modulo un autre nombre premier, par exemple ou ou encore de même que ; Modèle:Aldans le domaine de l'astronomie il publia un travail très important sur le mouvement des corps célestes contenant le développement de la méthode des moindres carrés ; auparavant, en , il développa une nouvelle méthode de calcul lui permettant de prédire où doit se trouver Cérès une planète naine de la ceinture des astéroïdes entre Mars et Jupiter ; Modèle:Aldans le domaine de la physique il est l'auteur de deux des quatre équations de Maxwell gérant l'électromagnétisme ; Modèle:Alcertaines de ses contributions n'ont été mises à jour qu'à titre posthume, à la fin du XIXème siècle, Gauss n'ayant publié qu'une partie de ses découvertes. Modèle:AlLeonhard Euler (1707 - 1783) mathématicien et physicien suisse qui passa la plus grande partie de sa vie dans l'Empire russe et en Allemagne ; en mathématiques il fit d'importantes découvertes dans des domaines aussi variés que le calcul infinitésimal et la théorie des graphes, il introduisit également une grande partie de la terminologie et de la notation des mathématiques modernes, en particulier pour l'analyse mathématique, comme la notion de fonction mathématique ; il est aussi connu pour ses travaux en mécanique, en dynamique des fluides, en optique et en astronomie. Modèle:AlJames Clerk Maxwell (1831 - 1879) physicien et mathématicien écossais, principalement connu pour ses équations unifiant l'électricité, le magnétisme et l'induction ainsi que pour l'établissement du caractère électromagnétique des ondes lumineuses, mais aussi pour sa distribution des vitesses utilisée dans une description statistique de la théorie cinétique des gaz ; le tire-bouchon fictif permettant de déterminer l'orientation à droite d'un espace tridimensionnel ou le caractère direct d'un triplet de vecteurs a été baptisé « tire-bouchon de Maxwell » en son honneur.
↑ Cette notion d'angle non petit étant bien sûr à préciser
![Positionnement des espaces objets réel et virtuel à gauche, des espaces images réelle et virtuelle à droite[6]](https://upload.wikimedia.org/wikipedia/commons/e/e4/Espaces_objet_et_image.jpg) Positionnement des espaces objets réel et virtuel à gauche, des espaces images réelle et virtuelle à droite[6]
Positionnement des espaces objets réel et virtuel à gauche, des espaces images réelle et virtuelle à droite[6]![Positionnement des espaces objets réel et virtuel à gauche, des espaces images réelle et virtuelle à droite[6]](/wiki/Fichier:Espaces_objet_et_image.jpg)
![Exemples d'axe optique principal d'un dioptre ou d'un miroir[10]](https://upload.wikimedia.org/wikipedia/commons/8/8f/Axe_optique_principal.jpg) Exemples d'axe optique principal d'un dioptre ou d'un miroir[10]
Exemples d'axe optique principal d'un dioptre ou d'un miroir[10]![Exemples d'axe optique principal d'un dioptre ou d'un miroir[10]](/wiki/Fichier:Axe_optique_principal.jpg)
![Exemples d'axe optique principal d'un prisme à réflexion totale[10] ou d'un fibre optique courbée[11]](/wiki/Fichier:Axe_optique_principal_bis.jpg)



 Justification de la propriété de point double pour les points d'un miroir plan
Justification de la propriété de point double pour les points d'un miroir plan Justification de la propriété de point double pour les points à l'infini d'un miroir plan
Justification de la propriété de point double pour les points à l'infini d'un miroir plan





 Repérage d'un point objet ou image sur l'axe optique principal d'un dioptre, lien entre la réalité ou la virtualité du point et le signe de son abscisse
Repérage d'un point objet ou image sur l'axe optique principal d'un dioptre, lien entre la réalité ou la virtualité du point et le signe de son abscisse Repérage d'un point objet ou image sur l'axe optique principal d'un miroir, lien entre la réalité ou la virtualité du point et le signe de son abscisse
Repérage d'un point objet ou image sur l'axe optique principal d'un miroir, lien entre la réalité ou la virtualité du point et le signe de son abscisse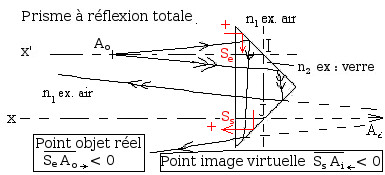 Repérage d'un point objet ou image sur l'axe optique principal d'un prisme à réflexion totale, lien entre réalité ou virtualité du point et signe de son abscisse
Repérage d'un point objet ou image sur l'axe optique principal d'un prisme à réflexion totale, lien entre réalité ou virtualité du point et signe de son abscisse